

MalusCorp offers a service to recreate software from scratch using AI, eliminating open source license obligations. They charge per kilobyte of unpacked size on npm, with a full refund if their code infringes on the original license.

Angela Lipps, a Tennessee grandmother, was wrongly accused of bank fraud in North Dakota and spent 5 months in jail. Facial recognition software led to her arrest, but her bank records proved she was in Tennessee at the time of the alleged crimes.

J D Vance's claim that ATMs didn't displace bank tellers is true, but it's because ATMs were a complementary technology that increased demand for tellers to focus on relationship banking. The real reason bank teller employment declined was the rise of mobile banking, enabled by the iPhone, which made physical bank branches and tellers obsolete.

US corporate default rate rose to 9.2% in 2025, a record high according to Fitch Ratings. Defaults were mainly among smaller issuers with $25 million or less in earnings due to high interest rates.

Asia's governments are taking extreme measures to save fuel due to high oil prices and a closed Strait of Hormuz. Measures include work-from-home demands, price caps, and restrictions on travel and energy use.
sAT Protocol is a decentralized social networking protocol based on static sites where users own and control their data. Users follow each other by mutual consent and data is encrypted and stored on their own websites, accessible only to those they follow.
Researchers at Stanford Medicine and the Arc Institute found that the gut microbiome plays a critical role in age-related cognitive decline. They discovered that stimulating the vagus nerve can restore memory function in old mice, suggesting a potential treatment for age-related cognitive decline.

The MacBook Neo handles database workloads well, completing queries in under a minute in cold runs and 15 minutes in total. However, its disk I/O and 8 GB memory limit make it unsuitable for daily Big Data workloads.

Click download now to get access to the following files: there needs to be an option to play the sorted samples also :) is the source online?

The author built a web application called setlist.rocks using Ruby on Rails, rediscovering the joy of building a web application the old-fashioned way and appreciating the simplicity and expressiveness of Rails. The author found that Rails 8 has become a very different beast, with a simplified JavaScript library bundling tool, a "no build" approach, and new features like Solid Cache and Solid ...


Dolphin emulator adds Triforce arcade support and major performance boosts to Rogue Squadron games.

The Metropolitan Museum of Art has a new archive of high-definition 3D scans of over 100 historical objects. Viewers can zoom in, rotate, and examine each model using augmented reality on smartphones and VR headsets.


We build a computer inside a transformer — executing arbitrary C programs for millions of steps with exponentially faster inference via 2D attention heads.

CodeSpeak replaces existing code with specs 5-10x smaller in mixed projects. It generates specs from real code, making maintenance easier for humans.
Please enable JS and disable any ad blocker

The user, a self-confessed foodie and nerd, set up Home Assistant to control and automate their irrigation system and other smart devices at home. They successfully integrated various hardware and software components, including Link-Tap, Proxmox, and Zigbee devices, to create a comprehensive smart home system.
An Iranian hacktivist group, Handala, claimed responsibility for a data-wiping attack on Stryker, a global medical technology company, in retaliation for a US missile strike that killed 175 people in Iran. The attack has forced Stryker to shut down offices in 79 countries and is affecting healthcare providers worldwide.

3D-knitting is a method of garment making that uses advanced computerized machines to create seamless clothing with little to no human input, reducing waste and producing high-quality, customizable products. This technology is expected to revolutionize the fashion industry by offering on-demand production, sustainability, and better quality clothing, potentially replacing traditional ...


The author reflects on the impact of AI-assisted coding, revealing a divide among developers between those who value the craft and those who prioritize results. They acknowledge their own grief over the changing web and career landscape, but note that their satisfaction in coding remains unchanged despite the new tools.
Search Program Award Type Phase Type State Start Year (min) Start Year (max) Min Award Amount ($)

The user argues that trigonometry should be avoided in 3D rendering codebases, instead using vector operations to simplify and optimize calculations. A specific example of rotating a vector around another vector is used to demonstrate this approach, resulting in a more efficient and stable solution.


Axe is a tool that treats LLM agents like Unix programs, allowing them to be composed and run from the command line. It uses TOML configuration files to define agents with focused skills and abilities.
Please enable JS and disable any ad blocker

Claude can now create custom charts and diagrams in-line in chat conversations to aid users' understanding. Users can interact with these visuals and ask for adjustments or more details as the conversation evolves.


A database tied to IDMerit, a company that verifies identities, exposed 1 billion sensitive records across 26 countries, including 203 million in the US. The exposed data included full names, home addresses, dates of birth, and national ID numbers, which could be used for targeted phishing scams and SIM-swap attacks.


US banks have lent nearly $300bn to private credit providers, with overall lending to non-depository financial institutions reaching $1.2tn. Top lenders include Wells Fargo, Bank of America, PNC, Citigroup, and JPMorgan Chase.


Thalía Sánchez's daughter was denied enrollment in Alsip Hazelgreen Oak Lawn School District 126 due to license plate recognition software showing her car in Chicago. The school district uses a $41,904 contract with Thompson Reuters Clear to track vehicle locations for residency verification.

Apple's MacBook Neo has a modular design and lower repair costs, with a separate keyboard component and prices starting at $599. The laptop's repairability features include easier battery replacement and lower costs for out-of-warranty repairs.

Iran claims responsibility for an underwater drone attack on two oil tankers near Basrah, Iraq, killing one and rescuing 38 crew members. The attack occurred within Iraqi territorial waters, escalating regional conflicts and strikes on commercial shipping.


LLMs' performance improves when passing tests but worsens when considering mergeable quality. Merge rates show no improvement since early 2025, contradicting initial observations.
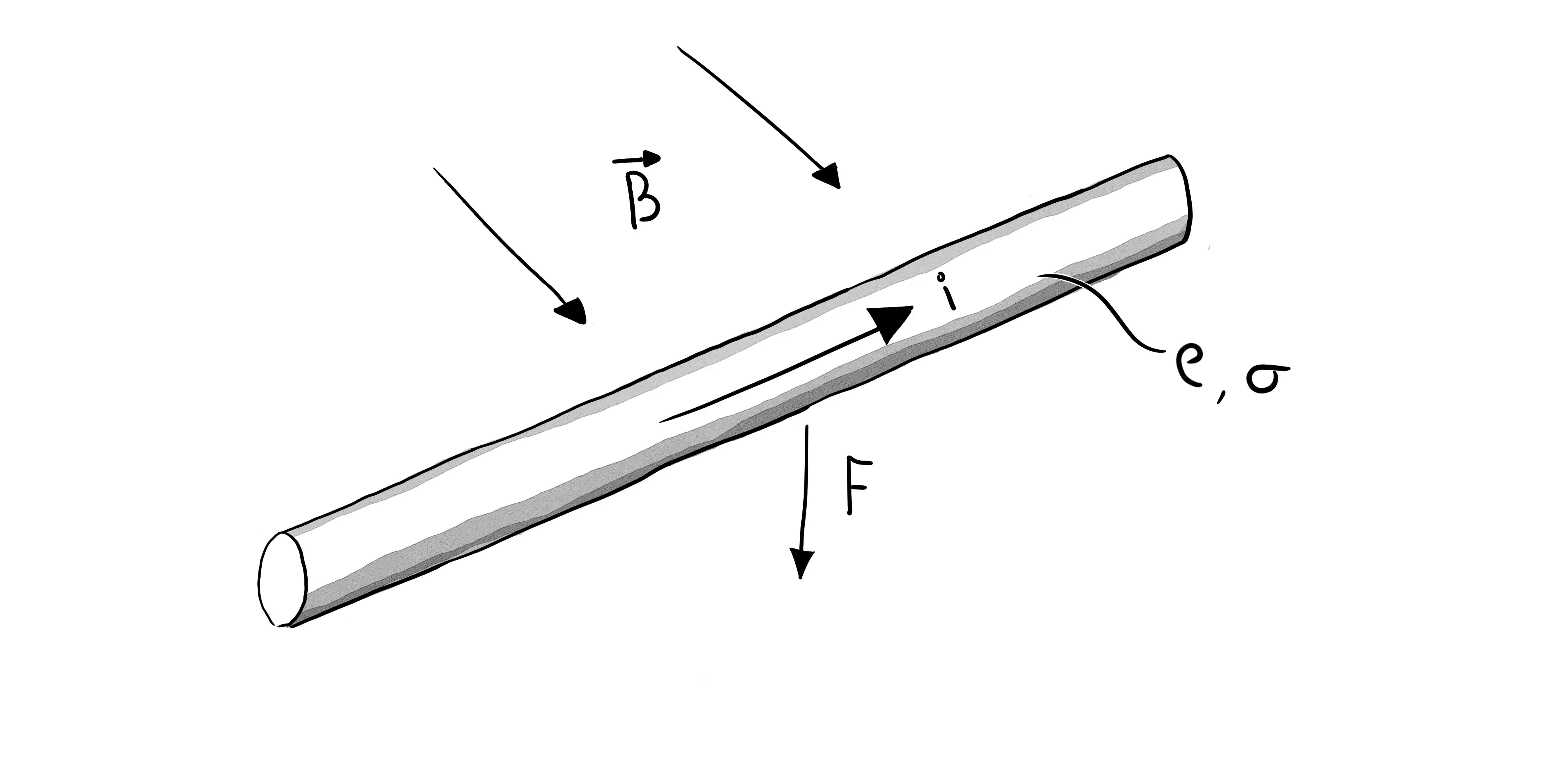
The user discusses the fundamentals of robot actuators, specifically the relationship between motor size, torque, power dissipation, and reflected inertia, and proposes a figure of merit that is size-invariant. This figure of merit, normalized motor constant, is useful for comparing motors of different sizes and is primarily determined by power dissipation at a given torque, not gear ratio or ...

Erlang's actor model, which isolates processes through separate heaps and message passing, is a strong implementation of concurrency, but it still has performance limitations and can reintroduce shared mutable state bugs when scaling. Any concurrency model that achieves safety through isolation will eventually face a tradeoff between safety and performance, as serialization can't keep up with ...

Fungi play a crucial role in ecosystems, forming symbiotic relationships with plants and helping them absorb nutrients and water. Despite their importance, many fungal species are endangered due to lack of knowledge and conservation efforts.

OneCLI is an open-source gateway that securely stores API credentials and injects them into AI agent requests. It provides a single place to manage access, rotate keys, and monitor agent activity.


Knowledge base poisoning is a real threat where attackers inject fabricated documents into a knowledge base to manipulate LLM responses, making it a persistent and invisible attack. Embedding anomaly detection at ingestion is the most effective defense layer, reducing the attack's success rate from 95% to 20% in a local lab test.
wolfIP is a TCP/IP stack for resource-constrained systems with endpoint mode and no routing. It's licensed under GPLv3 and can be used with POSIX shim and TAP device.

Colorectal cancer is now the leading cause of cancer death in the US for people under 50, with most diagnosed with advanced cancer due to lack of screening and ignoring symptoms. Experts warn people to take symptoms seriously, especially rectal bleeding, and consider screening tests like Cologuard for those without symptoms.
To use Rudel analytics with Claude Code, install Rudel via npm and authenticate via browser, then enable auto-upload sessions. Rudel ingests session data, including sensitive material, so review the Privacy Policy before enabling uploads.


Libby Cope and her boyfriend Jacob Arnold made butter while running by shaking heavy cream in bags attached to their vests. They used the process to create over 4 pints of butter, consuming most of it and inspiring others to try the technique.

US Navy has declined to provide Strait of Hormuz escorts due to high risk of attacks, despite White House urging. Other nations like Pakistan and France are providing naval escorts to protect shipping in the region.

Google detected unusual traffic from your network possibly due to malicious software or automated requests. Solving the CAPTCHA will let you continue using Google services.

Understudy is a teachable desktop agent that operates your computer like a human colleague, extracting intent and remembering successful paths to handle routine work on its own. It's designed as a layered progression, with current status at Layers 1-2 implemented and usable today.

Atlassian is laying off 1600 employees, around 10 percent of its workforce, to invest in AI and strengthen its financial profile. The layoffs primarily affect developers and other software sector jobs in the USA, Australia, and India.
Steel Bank Common Lisp (SBCL) is a Common Lisp implementation that is bootstrappable from a variety of other Common Lisp implementations, not solely from itself or another language. SBCL's build process involves embedding an SBCL compiler within a host Lisp, using that embedded compiler to generate a fresh, standalone SBCL image, and then simulating the act of loading FASL files and saving a ...

Urea price rose 0.09% to 585 USD/T on March 10, 2026, up 52.15% from last year. It's expected to trade at 588.58 USD/T by quarter end and 667.23 in 12 months.

The author reflects on Gerald Sussman's comment that programming has changed from constructing systems from known parts to doing basic science on foreign libraries. The author disagrees, citing their own experience of learning to program in the 90s and early 2000s, where they struggled to understand complex systems and often resorted to trial and error.
Apple fixes security issues in older devices with Coruna exploit patches. Patches available for iPhone 6s, 7, SE, iPad Air 2, iPad mini, and iPod touch 7th gen.
Informal Systems created Quint to make software more reliable by validating AI-generated code through executable specifications. Quint's tools help developers build confidence in complex systems through exploration and property checking.
The user has been using Jujutsu (jj) as a Git replacement for 6 months and is hooked due to its intuitive tooling and ability to craft clear pull requests. They've developed a new workflow for reviewing code, duplicating changes, and squashing them into a parent change to track progress.

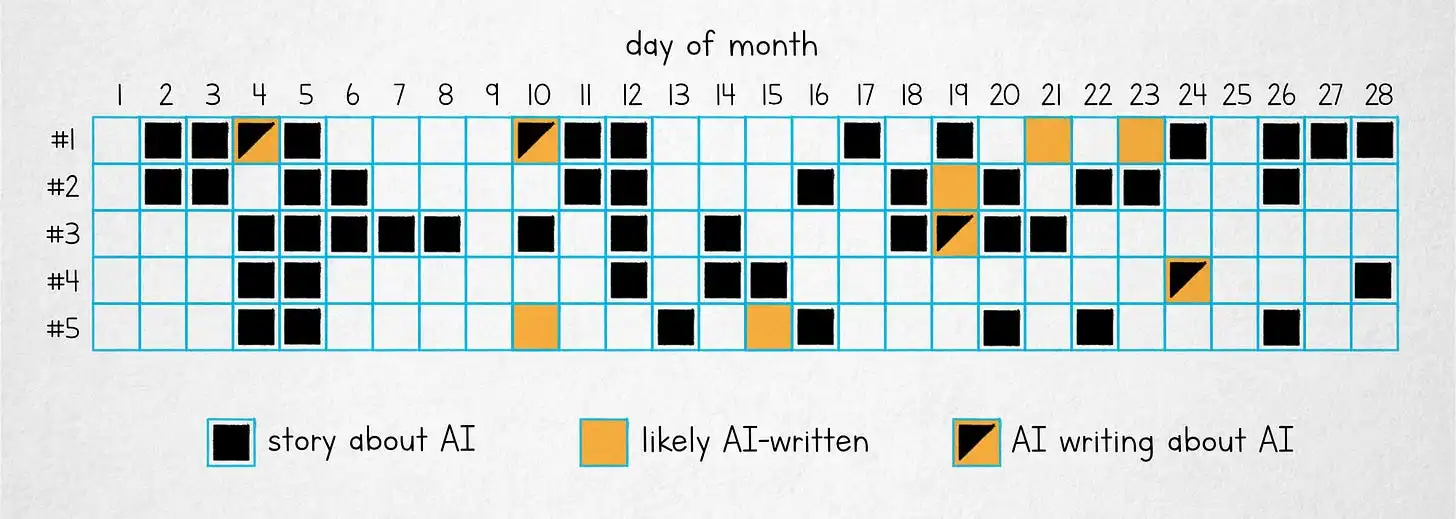
The author has a complicated relationship with Hacker News due to toxic commenters but is concerned about the site's recent AI-dominated content. An experiment using Pangram to detect AI-written stories found that many top stories in February 2026 were likely generated by AI.


IPv4x is a hypothetical extension of IPv4 that added 96-bit addresses, allowing for more space without replacing IPv4. This incremental approach avoided a "flag day" and enabled a smooth transition, but ultimately led to the development of IPv6 as a clean break.

This is Nathan Cavanaugh, another DOGE staffer explaining how he flagged grants at NEH for "DEI" which would be reviewed for termination. 404 Media has reviewed hours of this footage and we'll have more soon. Part of a lawsuit by @acls1919.bsky.social, @modernlanguage.bsky.social + @historians.org

Stephen Jay Gould and Simon Conway Morris debated the nature of evolution, with Gould viewing it as radically contingent and Morris arguing for convergent evolution.

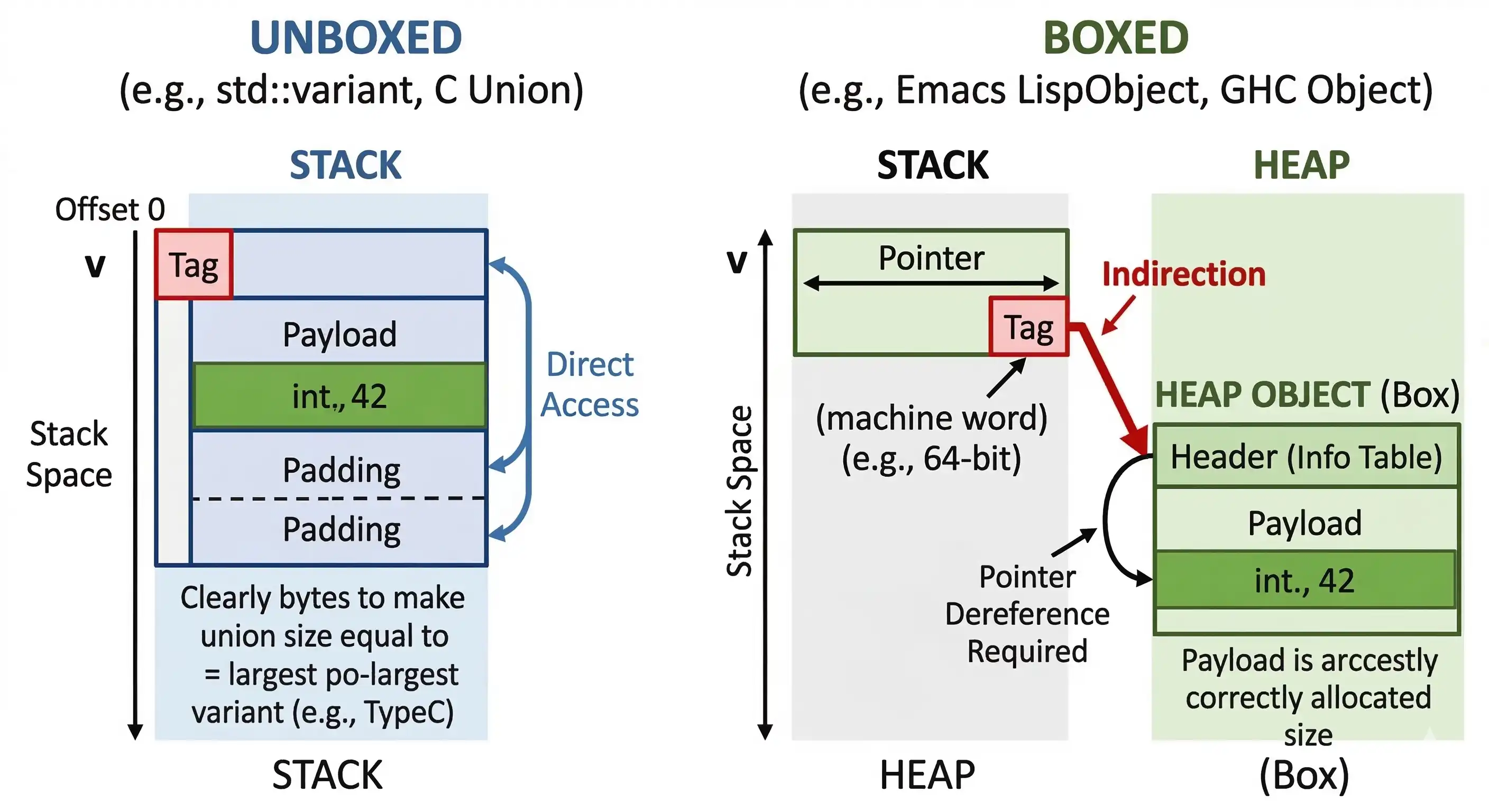
GNU Emacs uses a 64-bit Lisp_Object to represent different types of Lisp values, reclaiming unused bits as a type tag, while other systems like LLVM use custom RTTI and struct embedding to manage dynamic typing within memory constraints. Different systems use various techniques such as tagged pointers, fat pointers, and struct embedding to efficiently represent different types and manage memory usage.

Oil prices rose 9% to $100 a barrel despite a record 400 million barrel release from emergency reserves. Iran warned oil could reach $200 a barrel due to regional security concerns.
IonAttention Engine is a custom inference stack that multiplexes models on a single GPU, adapting to traffic in real time. It supports custom models and has applications in robotics perception, multi-camera surveillance, and AI video pipelines.

Explaining complex ideas to others helps clarify them in your own mind. The act of teaching and programming forces you to break down ideas into simple steps, leading to deeper understanding.


The USDA is downsizing by selling its aging South Building and relocating staff to new hubs in several states. This move is part of a larger effort to reduce the department's size and footprint in the national capital region.
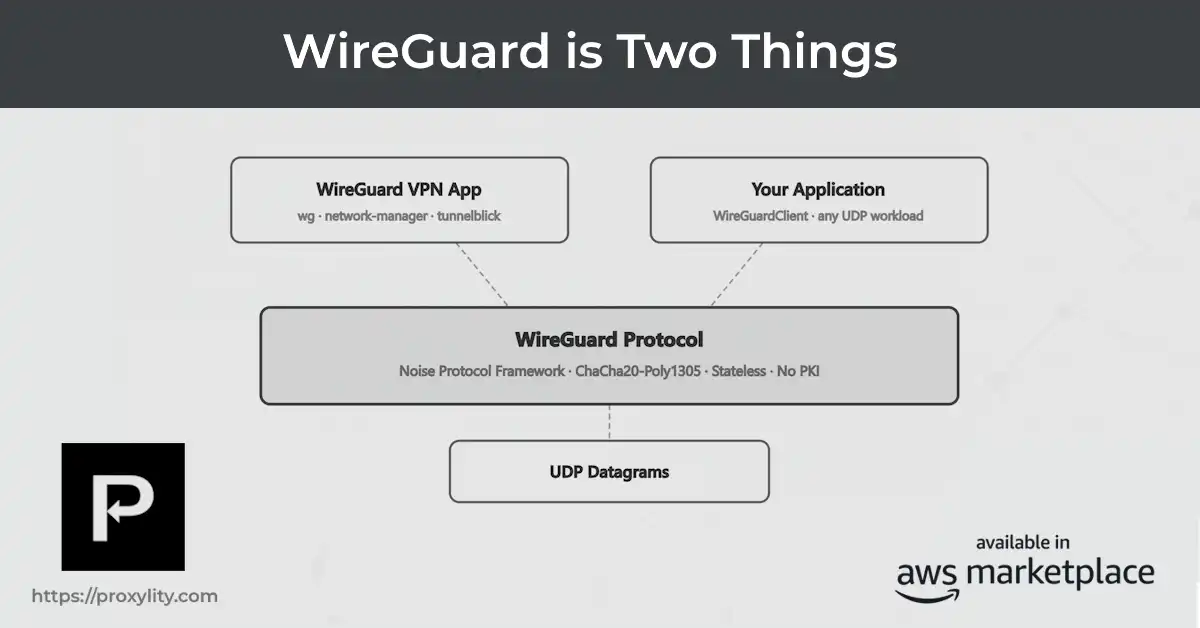
WireGuard is a cryptographic protocol that encrypts UDP datagrams, allowing for secure data transfer without the need for a VPN or complex key management. A .NET library called wg-client provides a simple way to use WireGuard for encryption, making it suitable for use in embedded devices, IoT applications, and other environments where TLS is too heavy or complex.

Researchers developed LAPIS, a compiler framework for optimizing sparse linear algebra operations across diverse architectures. LAPIS enables productivity, performance, portability, and distributed memory execution with linear algebra-level optimizations.
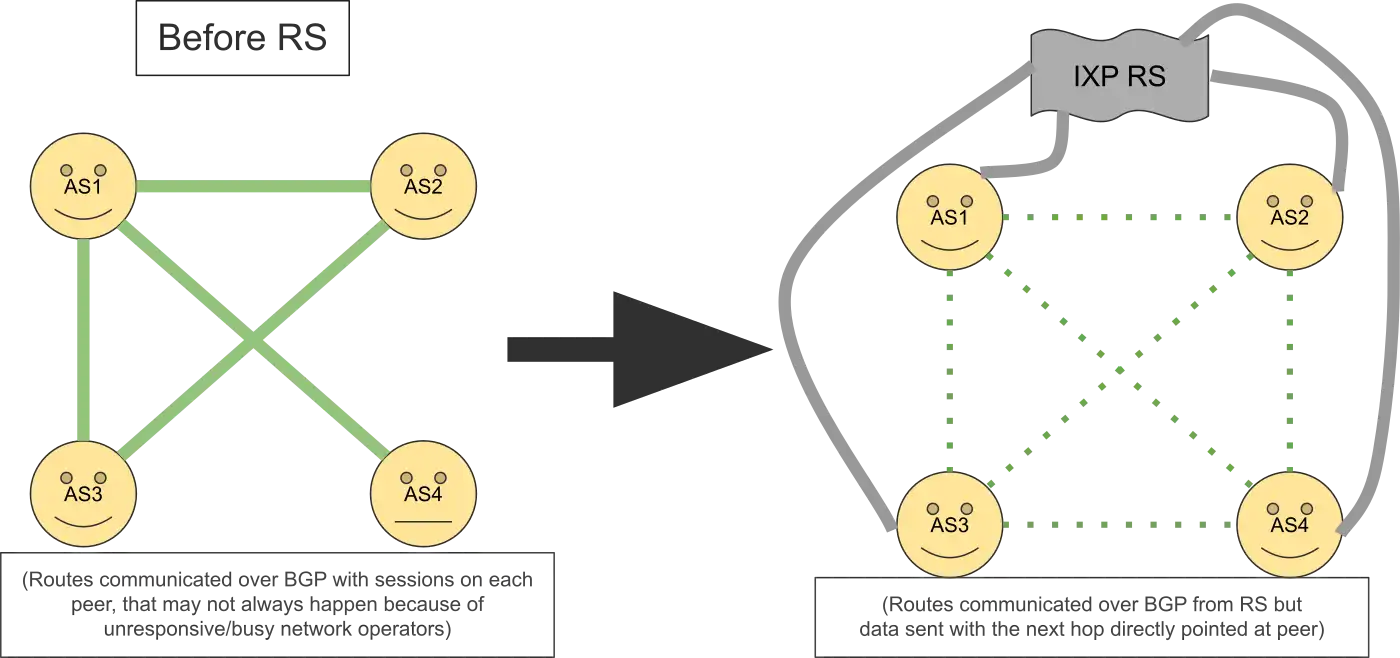
Internet exchange route servers simplify interconnection by distributing routes from members to other members, but they may not be as effective for attracting traffic due to low inbound reachability. Route servers can be useful for learning peering routes, but for inbound-heavy networks, Private Network Interconnects may be a better option due to economics and the trend of major content ...
Flickr was a pioneering platform that promoted interoperability and openness on the web, introducing innovative features like APIs, machine tags, and the Where On Earth ID system. Despite its eventual downfall, Flickr's legacy continues to inspire developers with its commitment to an open and remixable web, a vision that still resonates today.
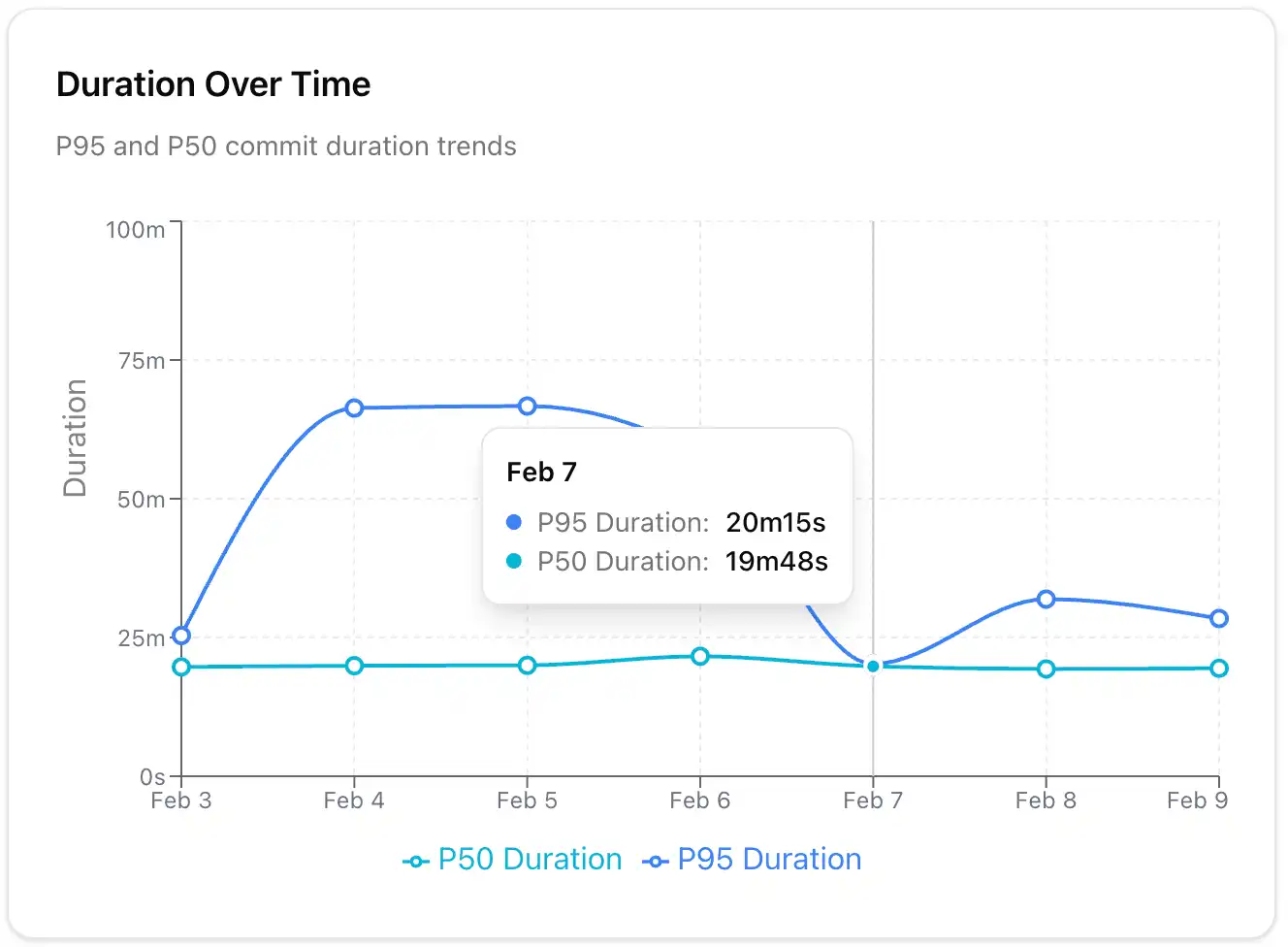
PostHog's CI runs 575,894 jobs weekly, processing 1.18 billion log lines and 33 million tests, making flaky tests a significant issue. Mendral, an AI agent, diagnoses CI failures, quarantines flaky tests, and opens PRs with fixes to help teams like PostHog stay fast and productive.

Stryker, a medical device company, was hit with a severe cyberattack by Iranian hacktivists Handala, causing global system shutdowns and data theft. The attack, reportedly in retaliation for a US bombing in Iran, has affected 56,000 employees and 200,000 servers.

The Hutterite community originated in 1525 in Zurich, Switzerland, and was persecuted for centuries, but survived due to tolerance in the Russian steppe. Today, 58,000 Hutterites live in North America, with a unique demographic record of high fertility and rapid growth, but now facing declining birth rates and changing social trends.
We present lf-lean, a verified translation of 1,276 statements from Rocq to Lean, achieved through task-level specification generators. This approach scales human oversight from O(n) to O(1) regardless of program complexity.

Arca Noae released ArcaOS 5.1.2 with improved UEFI support and GPT-based disk layouts. It's free for those with active ArcaOS 5.1 subscriptions and available for download with a steep discount for ArcaOS 5.0 subscribers.
Browse GitHub without the bloat. Minimal JS, pages under 14KB.
perlsky is a Perl 5 PDS with AT Protocol support, offering accounts, OAuth, and sync features. It tests against official AT Protocol PDS for accuracy and runs end-to-end smoke tests for bug detection.

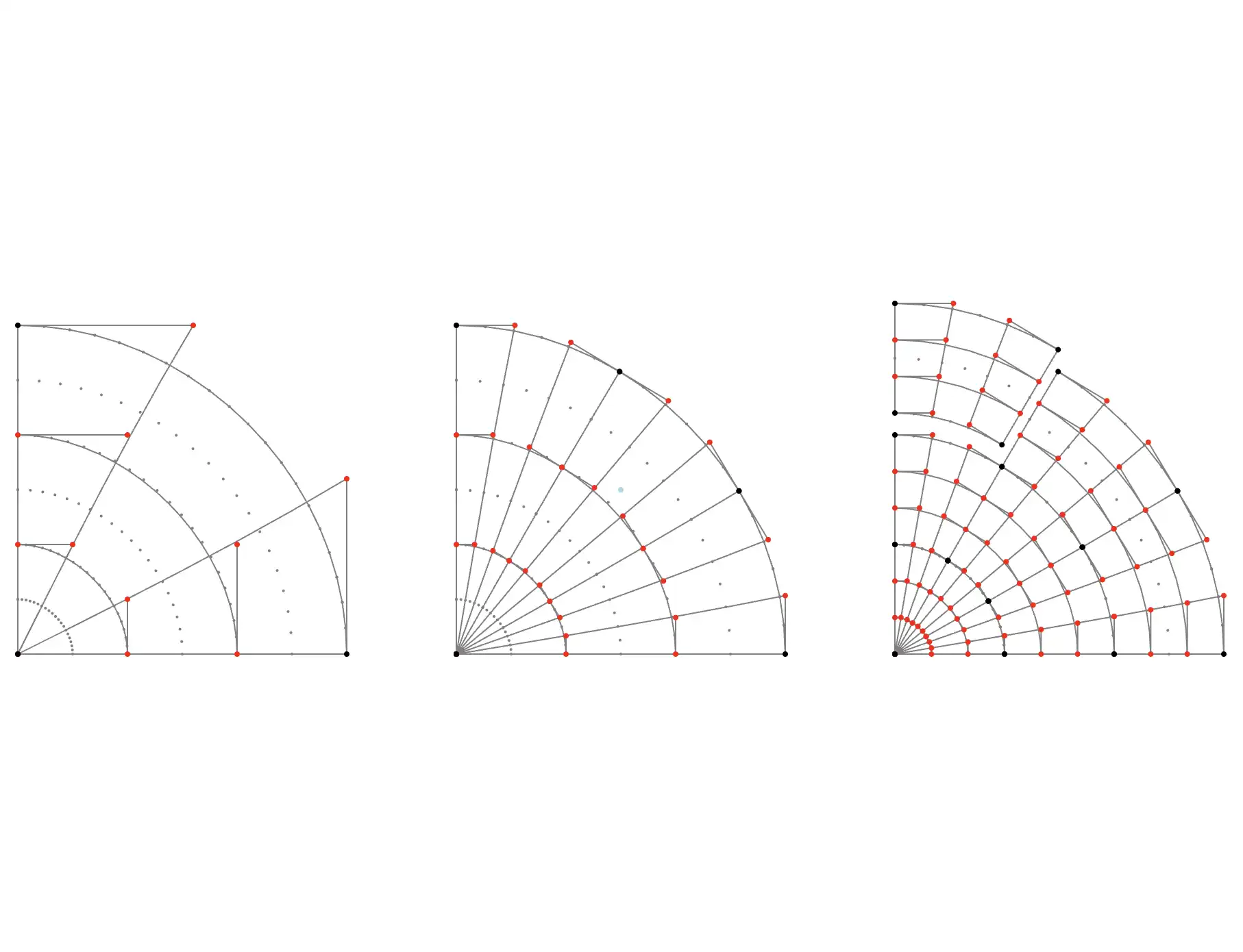
The code splits a Bezier surface into multiple pieces using the splitBezier function, allowing for deletion of individual pieces. It iteratively slices the surface horizontally based on the 'wide' parameter and creates new surfaces with each half.
The author created Contextual Commits, a specification for capturing the "why" behind code changes in Git history. This allows agents to learn from past decisions and scale more effectively.

Physicists at Brown University studied the time it takes for liquids to drain from containers, finding that viscosity greatly affects wait times. For low-viscosity liquids like milk, it takes 30 seconds to drain 90%, while for viscous liquids like olive oil, it takes over nine minutes.
AurionOS is a 32-bit x86 operating system built from scratch in C and Assembly by a 13-year-old in 14 days. It provides a bloat-free environment for learning and development with a custom sector-based filesystem and a shell supporting over 100 commands.


PycoClaw allows ESP32 flashing from a browser with no toolchain or terminal required. It brings full OpenClaw agent parity to embedded hardware with scripted runtimes and hybrid AI capabilities.
Sorry, something went wrong. We're working on getting this fixed as soon as we can.
Calyx is a terminal emulator with features like scrollback search, Git source control, and Claude Code IPC. It uses AppKit and SwiftUI for window and view management.

A command-line secret manager for developers, sysadmins, and devops. - loderunner/scrt
The author argues that decision theory is not abandoned by mainstream AI, but rather misunderstood as a competing method to deep learning. It's a framework for action under uncertainty, not a method for perception tasks.
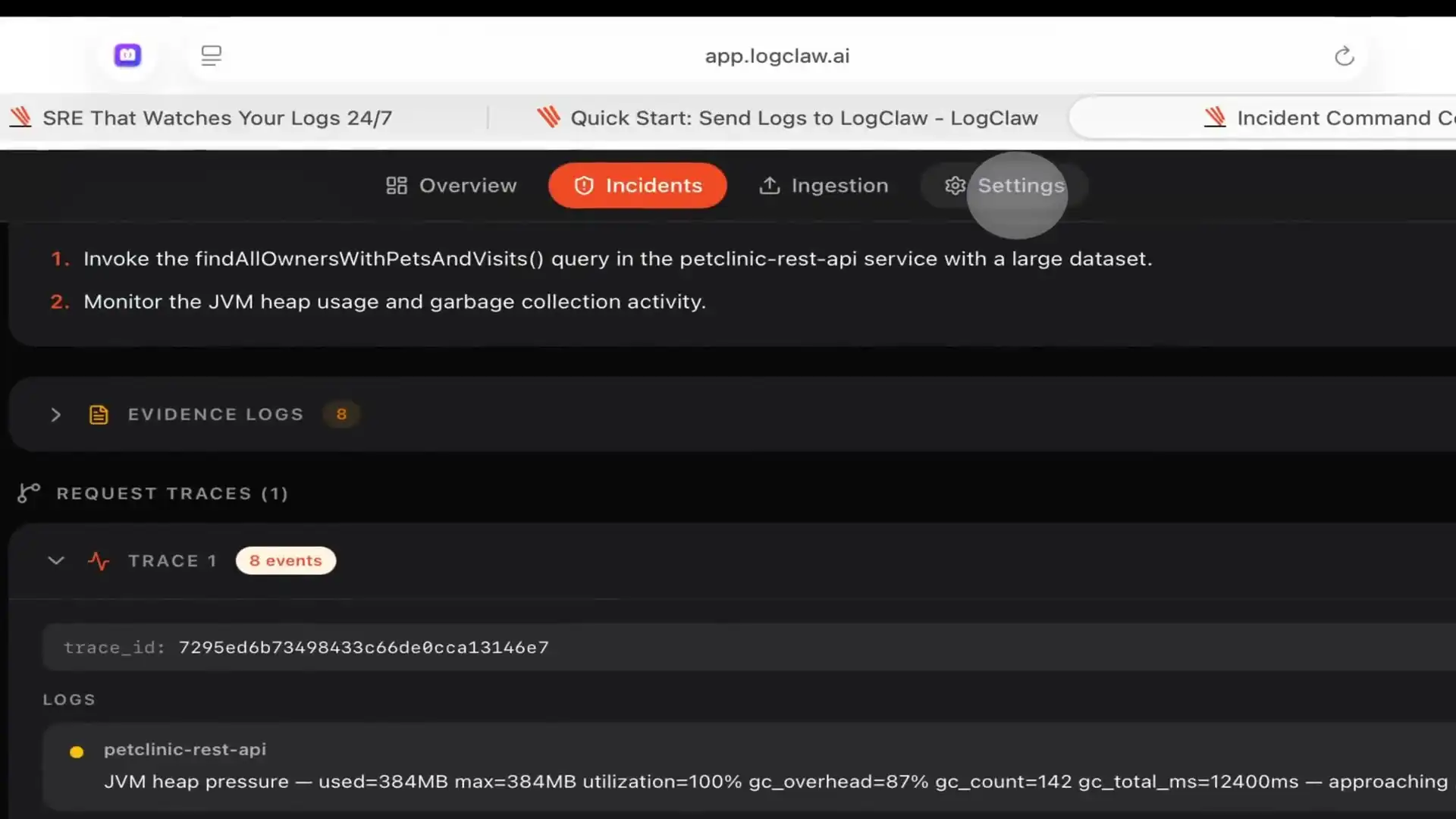
LogClaw monitors logs in real-time, detects anomalies, and auto-creates incident tickets with root cause analysis. It deploys inside your AWS, Azure, or GCP account with full data residency control and no vendor risk.

Vite 8 is released with Rolldown as its single, unified bundler, delivering up to 10-30x faster builds. The migration to Rolldown was community-driven and tested by early adopters.

obscrd is an open-source content protection system for React that scrambles HTML and blocks AI crawlers. It renders normal text for users but garbles it for scrapers through CSS ordering and decoy character injection.
The author recommends using bzip for text and code compression due to its simplicity and high compression ratio. Bzip achieves this through its use of Burrows-Wheeler transform (BWT) rather than LZ77, resulting in a more deterministic and efficient compression process.

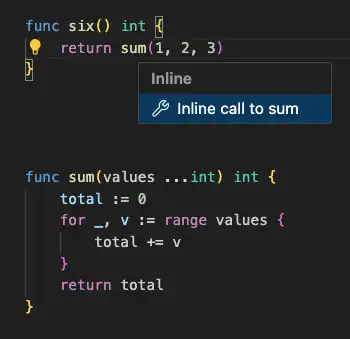
Go 1.26 introduces an all-new source-level inliner to help modernize Go code. The inliner replaces function calls with their bodies, enabling self-service API migration and upgrades with the //go:fix inline directive.